NASA to send mini robots to explore challenging terrain on the Moon
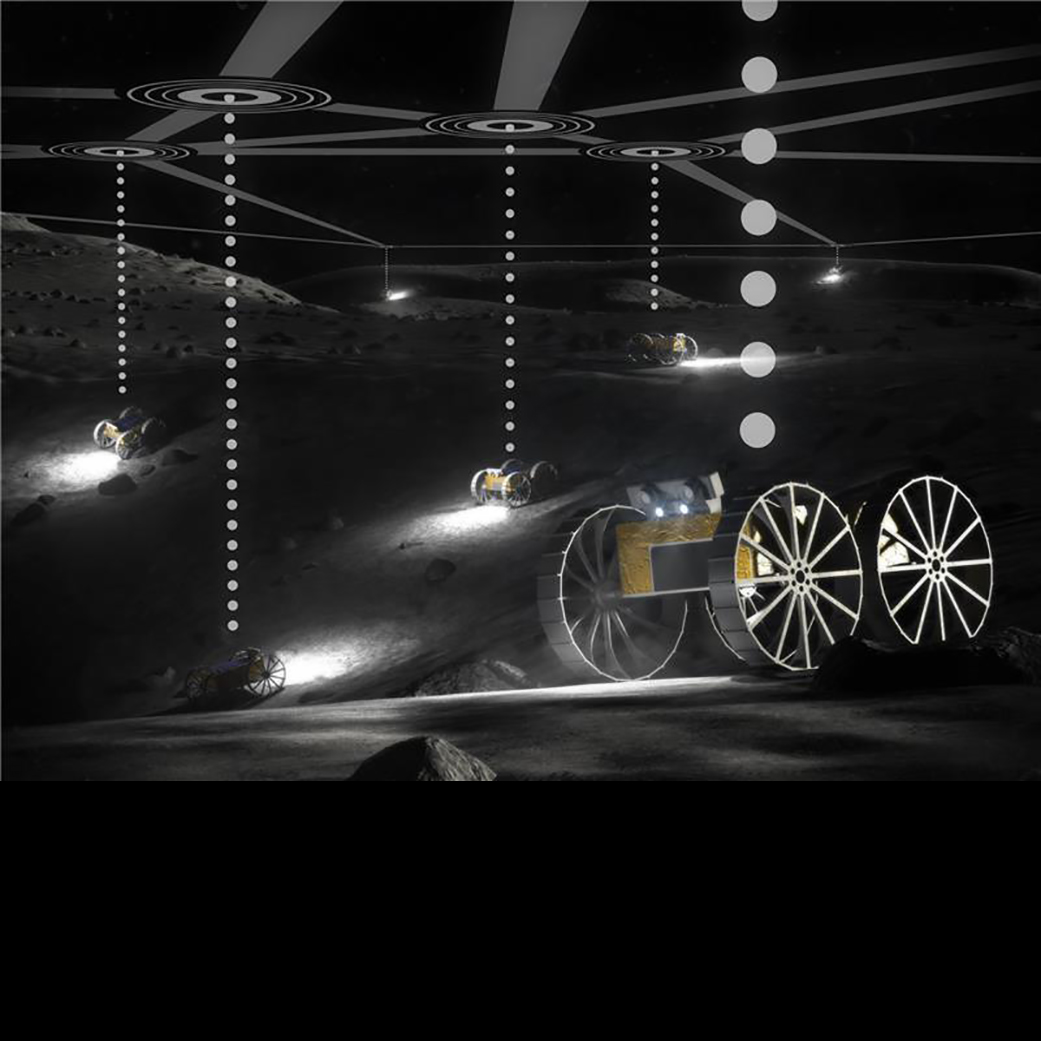
NASA's Cooperative Autonomous Distributed Robotic Exploration (CADRE) is working on a network of mini mobile robots, almost the size of a shoebox, that can work together as a team to autonomously explore planetary surfaces including the rugger lunar terrain.
Developed by NASA’s Jet Propulsion Laboratory in Southern California, the autonomous rovers will be able to make decisions and act without the requirement of constant human intervention, subsequently enabling them to be responsive to challenging exploration objectives. The mini rovers will collect data in hard-to-access and risky areas, such as inside craters and caves.
Each robot is equipped with two stereo cameras with multiple lenses and image sensors to sense the surrounding environment and map terrain in 3D and sense other rovers in the surrounding environment. When deployed on the surface, the robots would coordinate with one another via wireless radio to efficiently explore nearby terrain or make distributed measurements together.
The CADRE project aims to validate that this autonomous multi-agent system is capable of cooperative exploration that could enable new science for future missions.
CADRE is planned to launch as a payload on the third lunar lander mission by Intuitive Machines. If successful, the autonomous robotic technology could be expanded to include larger robots, base stations and other surface systems
Good things come in threes! These mini rovers, called CADRE, are heading to the Moon to show that multiple robots can cooperate and explore together autonomously. CADRE is launching as a payload on the third lunar lander mission by @int_machines. More: https://t.co/RibJXai22V pic.twitter.com/xEh0uxojgQ
— NASA Technology (@NASA_Technology) September 27, 2023
- READ MORE ON:
- NASA CADRE project
- NASA mini Moon robots
- NASA mini Moon rovers
- NASA









